Zurück zum Menü 4 4.0.12 Bau einer Murmelbahn Erstellt ab: 19.07.2011
|
|
|
Bereits vor
einigen Wochen kam mein
Sohn Nico hereinspaziert
und fragte mich, ob wir
nich mal wieder etwas
basteln könnten. wir
überlegten eine Weile hin
und her und dann sagte
ich:
"Du, Nico, ich habe damals mit meinem Freund eine Murmelbahn gebaut. Die war ganz aus Papier gemacht und unsere Kugeln stammten aus alten Kugellagern aus alten Fahrrädern." "Nö",
sagte Nico, " ich möchte
eine richtige Murmelbahn
haben, die auch ein
wenig länger hält."
"Ok",
meinte ich, "dann machen
wir eine aus Holz und
die Kugeln nehmen wir
aus Stahl.
Gesagt, getan, ich kaufte also zehn Stahlkugeln mit einem Durchmesser von 20mm:  Nein es ist nicht Halloween, dieses ist nur eine Fotobearbeitung ... ;-) Nachdem
wir also die
Kugeln hatten,
konnten wir
daran gehen
und die ersten
Elemente der
Murmelbahn
bauen. Dazu
gehörte
erstmal ein
ordentlicher
Mast in der
Mitte des
Brettes, um
später die
Bahnen daran
zu montieren
und natürlich
ein
PC-Netzteil,
um die
ebenfalls
selbstverständlich
unvermeidliche
Elektronik
antreiben zu
können:
 Den
Mast leimten
wir also
erstmal in die
Mitte des
Brettes und
begannen, die
Auslaufstrecke
der Murmalbahn
zu bauen:
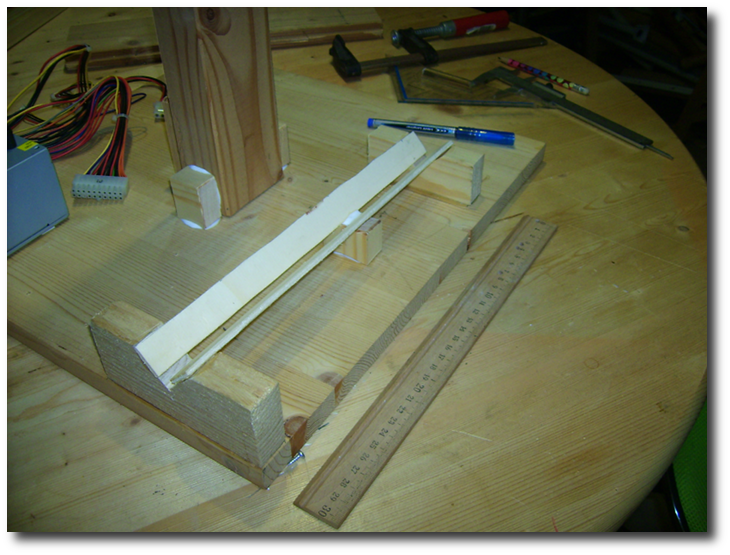 Wie hier zu sehen ist, haben wir für die Auslaufstrecke zwei Holzleisten quer genommen und in jede einen Keil geschnitten. In dieses "Dreieck" haben wir zwei kleine Holzplatten geklebt, die wir aus Bastel-Pappel-Holz (im Baumarkt) ausgeschnitten haben. 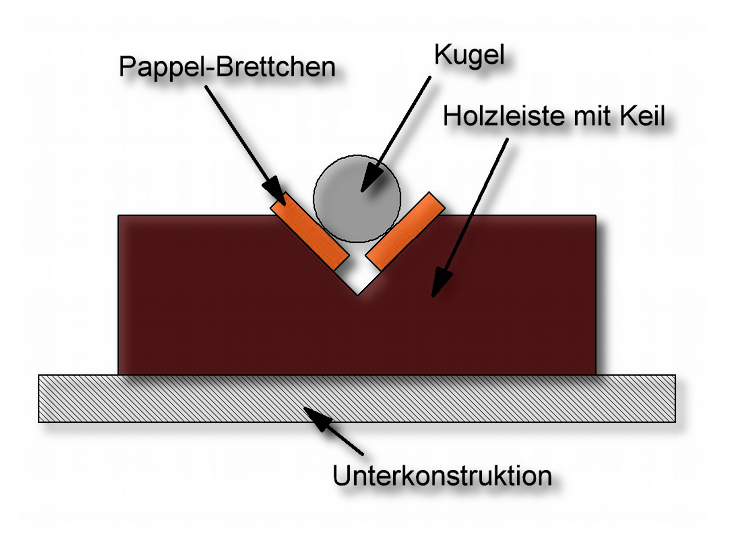 Nachdem wir die zehn Stahlkugeln auf diese Konstruktion gelegt hatten, sahen wir, dass sich die Brettchen durchbogen und also haben wir ungefähr in der Mitte noch einen Holzfuß spendiert. Als
nächstes
wollen wir die
Hubvorrichtung
für die Kugeln
basteln, denn
irgendwie
müssen die
Kugeln ja in
die Höhe
gehoben
werden, um
dann wieder
über die
verschiedenen
Bahnen
hinabzurollen.
31.07.2012
==>
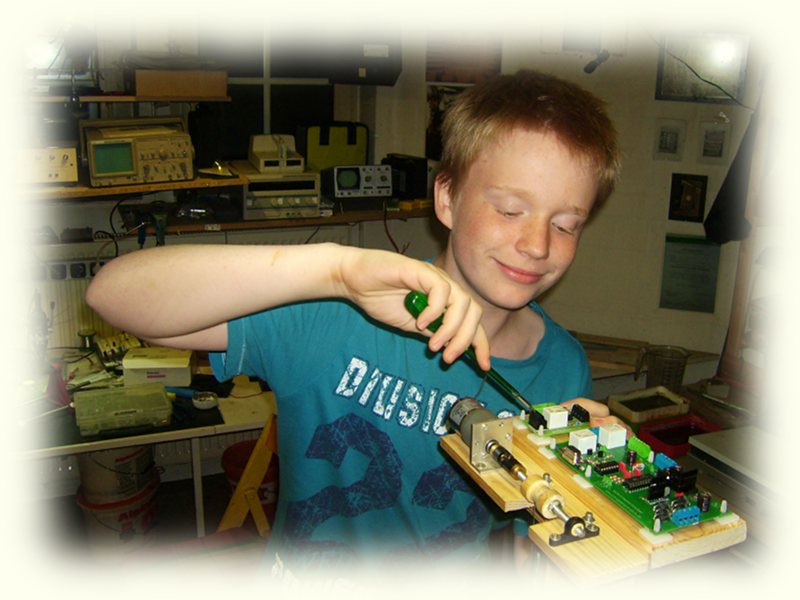
Nach langem Überlegen entschieden wir uns dafür, die Murmeln mit einem Schrittmotor und einem Elektromagnet aufnehmen und dann mit einem zweiten Motor, einem Gleichstrommotor in die Höhe heben zu lassen. Zunächst mussten wir den Schrittmotor an dem "Fahrstuhl" festschrauben:  Hier
befestigt der
"Chefbastler"
Nico den
Schrittmotor
am
Haltewinkel,
um ihn dann an
den
"Fahrstuhl" zu
schrauben.
Hiernach
konnten wir
uns dann der
Elektronik
zuwenden die
vorher
gleichtzeitig
in mehreren
Wochen
entstand. Wir
nahmen die
Platine des "Embedded-Systems", weil
wir damit sehr
wenig
"Kabelgewirr"
haben werden.
Die zweite
kleine
Platine, die
wir benötigen,
ist die Relaisplatine.
Beide Platinen
"schnorzten"
wir oben auf
ein Brettchen:
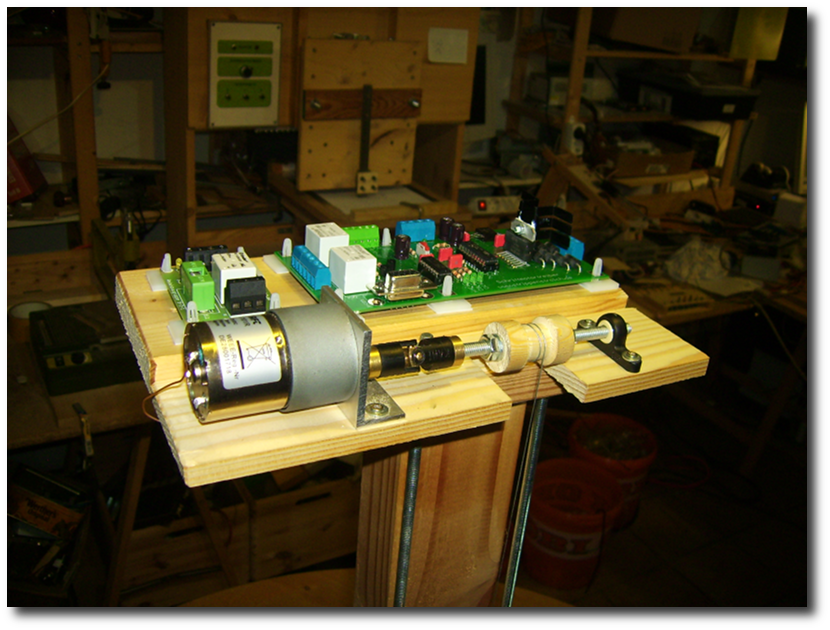
 Hier
noch einmal
eine
Impression des
Getriebemotors
mit den
Platinen im
Hintergrund:
 Wir
erinnerten uns
an die Brettschaltung
mit den
Reißbrettstiften
und begannen,
ein altes
PC-Netzteil zu
montieren. Von
diesem
Netzteil aus
verlegten wir
die Plus- und
Minusleitung
mit
Reißbrettstiften
als Lötstützpunkte
und
versilbertem
Kupferdraht
als Leiter.
Dieser Draht
wird auch oft
für die
Schmuckherstellung
benutzt. Ich
hatte noch
einen Ring
davon liegen
und also
nahmen wir
diesen Draht.
Hier
lötet Nico die
"Überlandleitung"
zu der
Platine:
 Wir
lehnten uns
zurück und
betrachteten
unser Werk.
Wir ließen den
Schlitten
probeweise auf
und ab gleiten
und erkannten,
dass dieser in
den
verwendeten
Aluminiumröhrchen
auf den
Gewindestangen
klemmte.
Also überlegten wir hin und her, wie wir den Schlitten gängig machen könnten. Ich erinnerte mich an die IGUS-Gleitlager, die eigentlich für die Version 3 meines Fräsplotters 2 (X-Y-Z-Maschine) vorgesehen waren. Wir bauten also vier dieser Gleitlager an den Schlitten. Und
siehe da, er
flutschte nur
so auf und ab.
 Jetzt
erklärte ich
Nico, wie der
untere
Schrittmotor
es macht, dass
er "weiß", wo
seine Position
ist. Ich
erklärte, dass
der kleine
Mikrocontroller
auf der
Platine sich
die Position
des Motors
merken würde
und den Motor
ganz genau an
eine bestimmte
Position
fahren könne.
"Und
der obere
Motor ?",
fragte Nico,
"woher weiß
der, wo der
Schlitten
gerade ist ?"
"Da müssen wir an wichtigen Stellen Endschalter hin bauen", meinte ich. "Oh, man, so viele Endschalter !" Nico war es gar nicht recht, so viele Kabel an die Murmelbahn anbauen zu müssen. "Da müssen wir halt für den oberen Motor auch einen Schrittmotor vorsehen", sagte ich einfach. "Haben wir denn noch einen Motor ?", fragte Nico neugierig. "Klar", beschwichtigte ich. Ich
erklärte Nico,
dass ich nicht
nur einen
zweiten
Schrittmotor,
sondern sogar
noch eine
zweite Platine
des Embedded
Systems
habe, die wir
an die
Murmelbahn
anbauen
könnten.
Wir überlegten nun, wie wir die beiden Platinen auf dem spärlichen Platz oben in dem "Maschinenraum" unterbringen könnten. Wir kamen auf eine Sandwich-Konstruktion: Beide
Platinen
sollten Rücken
an Rücken
angebacht
werden, damit
man noch gut
an die
Schraubklemmen
und an die
Programmieranschlüsse
herankommen
würde.
Gesagt, getan: 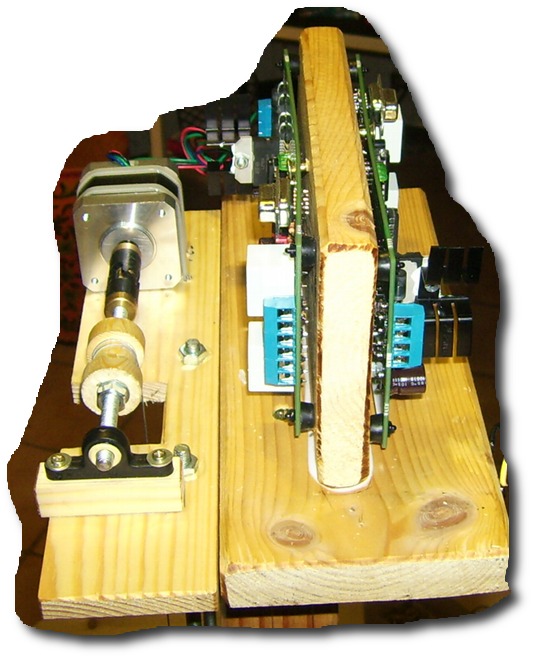 Das Ganze Gebilde nimmt nun schon langsam Formen an: 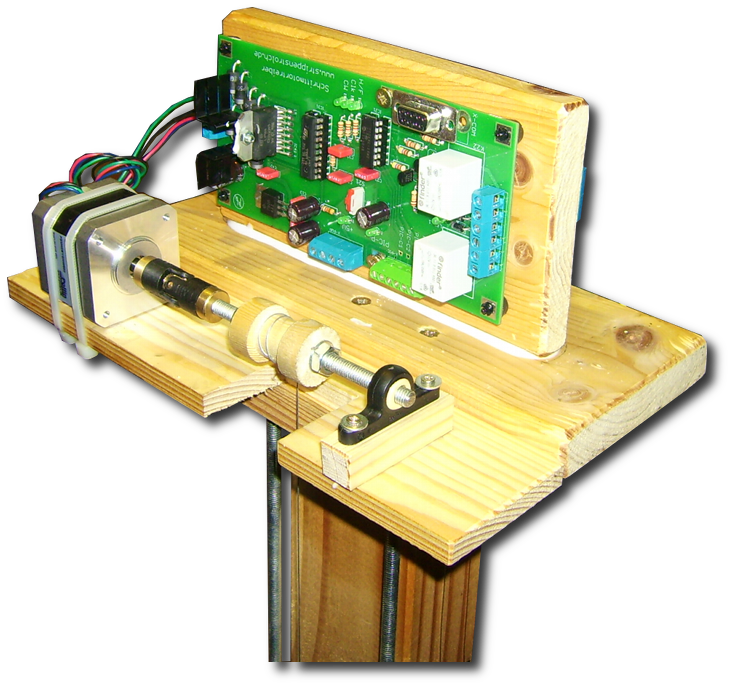 Ok, nun musste also erstmal der neu aufgetragene Leim trocknen. ==================================================== Der Artikel wurde in 2015 abgebrochen. ==================================================== Später, so Ende 2018 entdeckte ich dieses Fundstück im Netz. Ein wahres, echtes Meisterwerk: Viele Grüße,  |