Zurück zum Menü 5 5.1.13 Embedded System erkunden Erstellt ab: 12.05.2012 |
|
| Da
habe ich nun so schöne Platinen ersonnen und ich
unternehme gar nichts mit diesen Platinen. Das kann
natürlich nicht sein und so habe ich mich ein wenig in
"Embedded-Systems" eingelesen. In der Wikipedia steht ja
ein ganzer Artikel darüber. Wir hier auf dem
strippenstrolch.de machen uns die Sache etwas einfacher,
denn es handelt sich ja um eine einfache Bastelseite. Ich nahm also als erstes die Platine 9.1.1 und dann noch dazu eine Platine 9.2.2. Schließlich nahm ich noch einen passenden Schrittmotor hinzu und verkabelte das Ganze: 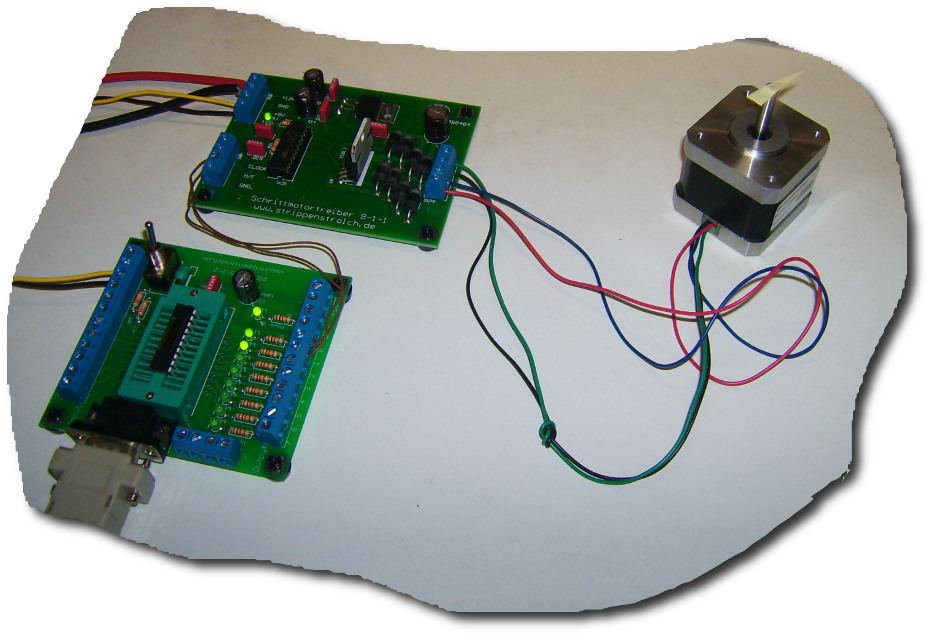 Dann ludt ich das folgende kleine Probeprogramm auf die Picaxe:
Das Ergebnis
funtkionierte auf Anhieb.
Sehr gut, die beiden Platinen arbeiten also schonmal ohne Schwierigkeiten zusammen ! Jetzt müssen wir mal
gucken, wie wir aus den zwei Platinen eine einzige
mit einem "Embedded System" machen. Dazu holen wir
uns erst einmal die beiden Schaltpläne auf diese
Seite:
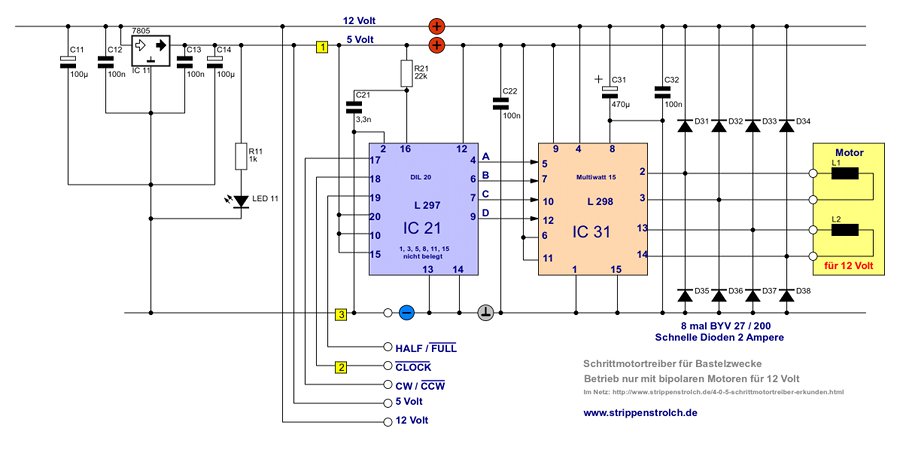
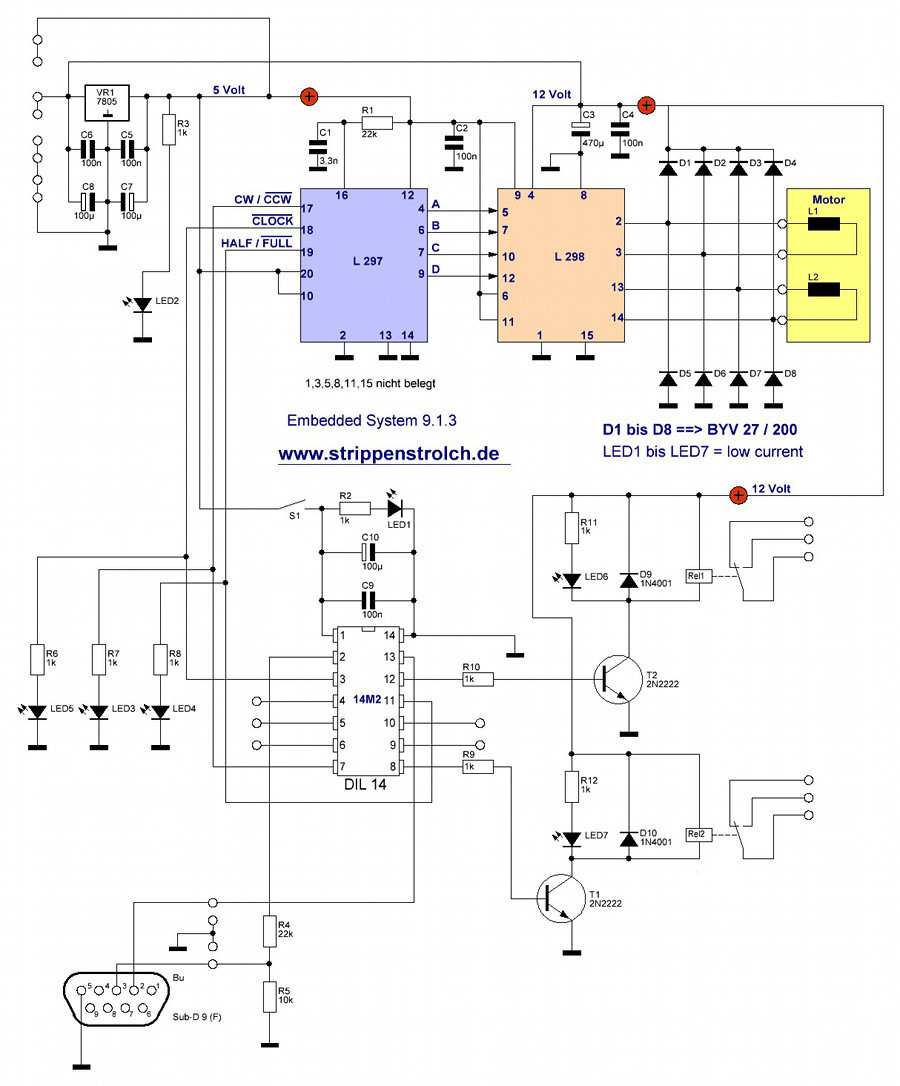
Platine 9.2.2 (Picaxe Lernboard) ==> 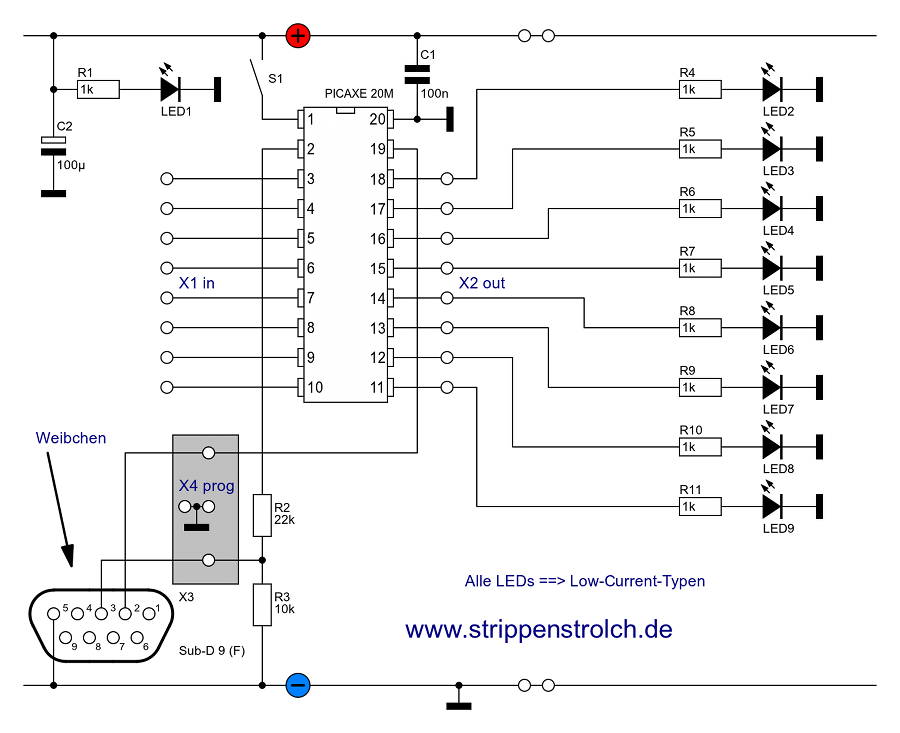 Jetzt
stellen wir uns die Aufgabe,
diese beiden Schaltpläne auf einer Platine zu kombinieren. Dabei sollten wir darauf achten, dass überschüssiger Ballast abgeworfen wird, damit das fertige "Embedded System" auch eine weitere, einfache "strolch'sche Platine" ergibt. Wir sehen also im oberen Schaltbild des Treibers schonmal drei Eingänge, die wir mit der Picaxe bedienen müssen:
Auf der Platine 9.1.1 sind diese Pins als Klemmen
herausgeführt. Die Klemmen benötigen wir am
Embedded-System nicht, denn wir wollen den
Motortreiber ja mit einer fest installierten
(Embedded) Picaxe betreiben. Also fallen schonmal
die vier Klemmen auf der Treiberplatine weg. Ebenso sehen wir im unteren Schaltplan, dass dort
eine Picaxe 20M verwendet wurde. Erstens ist diese
20M schon wieder veraltet (grummel) und zweitens
hat die 20M viel zu viele Ausgänge, die nur dazu
verleiten, zu viel "Gedöns" anzuschließen. Die
Wahl sollte also auf eine kleinere Picaxe fallen.
Eine 08M2 hingegen wäre ein wenig knapp bemessen,
denn nach Anschluss der drei Ausgänge blieben nur
zwei Eingänge übrig, um mit der Außenwelt in
Kontakt zu treten. Deshalb
fällt hier die Wahl auf eine Picaxe 14M2 Eine 14M2 wiederum
hat schon wieder zu viel Ausgänge, weshalb ich mir
gedacht habe, dem Embedded System noch zwei Relais
zu spendieren, mit denen man dann noch etwas an
der Ziel-Applikation schalten könnte. Gut, da haben wir
schonmal ein halbes Pflichtenheft zusammen:
Wenn wir jetzt daran gehen, und den Schaltplan zeichnen wollen, so müssen wir erstmal sehen, ob es eine sinnvolle Auswahl gibt, welche Pins auf den Treiber gelegt werden und welche Pins nach außen auf die Klemmen führen sollen. Dazu
sehen wir uns erst einmal das Pinout der
Picaxe 14M2 an:
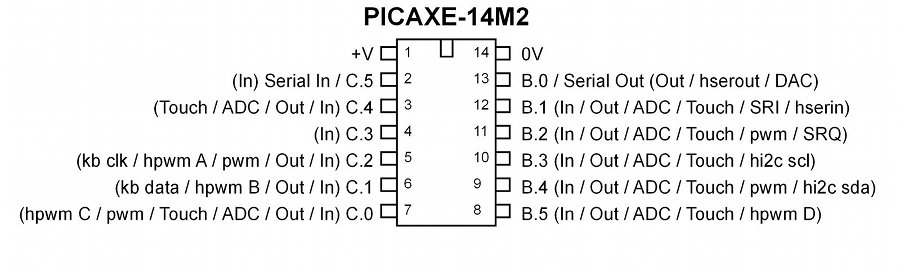 Wenn wir uns den i2c-Bus erhalten wollen, so fiele die Wahl der Ausgangspins vielleicht folgendermaßen aus:
Das fertige Embedded System hätte dann also 5
Eingangs/Ausgangs/Pins, an die man auch einen
i2c-bus anschließen könnte.
 Hieraus kann man jetzt eine Platine entwickeln. 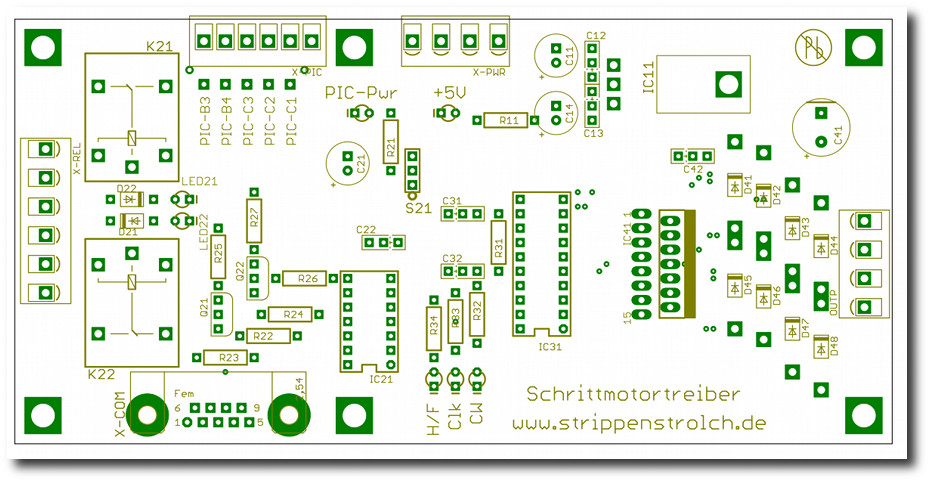 Das sieht doch schon
sehr vielversprechend aus, wie ich finde. Jetzt kann
ich schon daran gehen, und einen Prototypen
erstellen, um einmal zu sehen, wo und wie noch etwas
geändert werden muss. Die entsprechende Platine
sieht dann so aus:
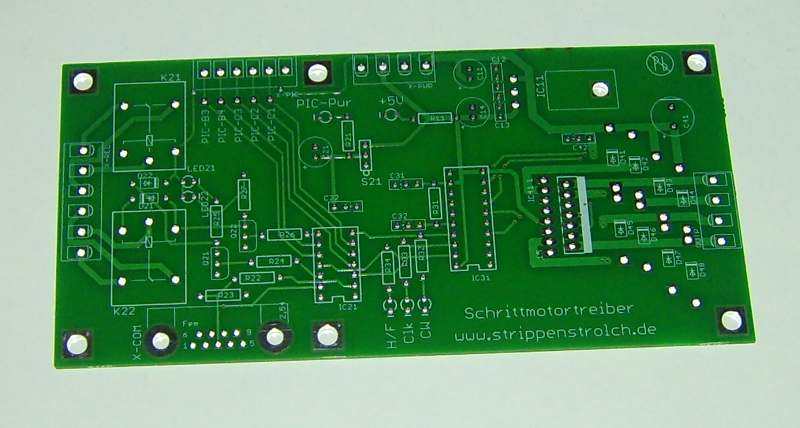 Diesen Prototypen
muss ich nun bestücken und dann kann es los
gehen, und unser System kann erkundet werden.
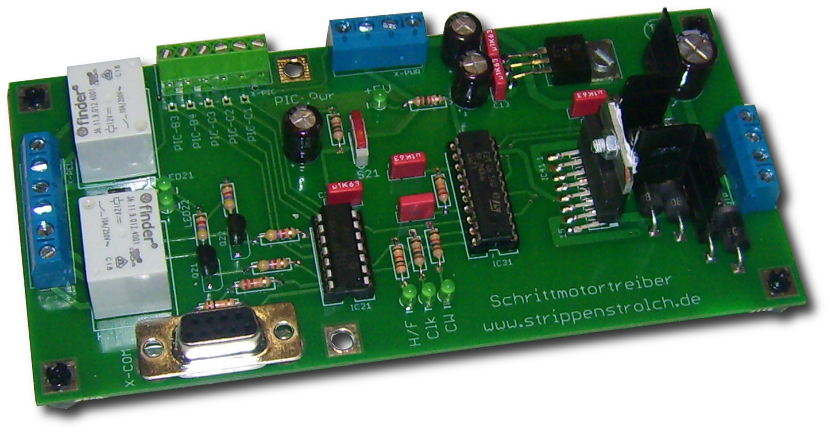
Schon bald war das Board fast fertig: 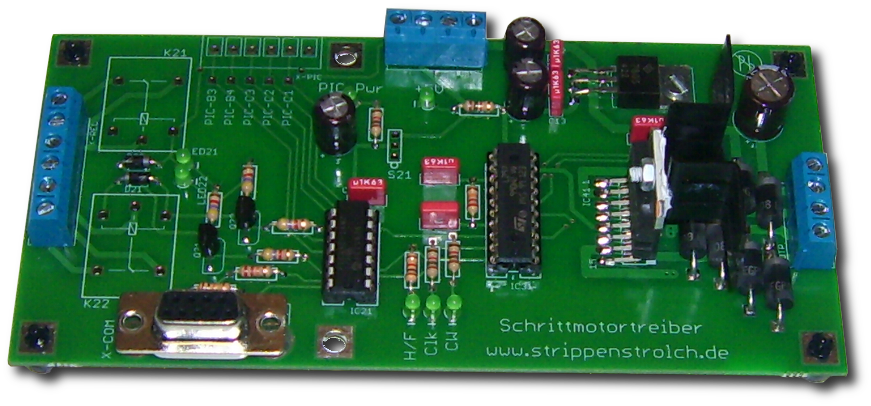 Leider ist es
bei Prototypen sehr oft so, dass man noch
Teile nachordern muss. So fehlen hier noch die
beiden Relais und eine Klemmleiste, sowie ein
kleiner Schalter.
Schließlich
ist das Board fertig zur Erprobung:
 Hier gibt es ein Projekt mit dieser Platine.  |
|
|
|