Zurück zum Menü 1 1.2.19 Motortreiber L6203 erkunden Erstellt ab: 07.10.2013 |
| Ich habe heute
endlich einmal Muße zu dem Projekt mit dem L6203
Motortreiber gefunden. Was mir schwer im Magen lag, war
die Tatsache, dass der L6203 an den Füßen ein ganz
unmögliches Rastermaß aufweist und zudem so dicke
Anschlussbeinchen hat, dass er nicht in die Löcher einer
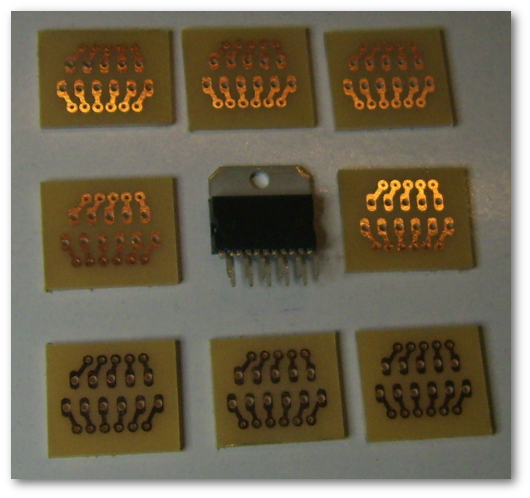
Lochrasterplatine passt. Ebensowenig passt er natürlich auf ein Steckbrett. Daher bin ich heute einmal dabei gegangen und habe ein paar Adapterplatinchen geroutet, die zu dem unmöglichen Maß der Füßchen passen: 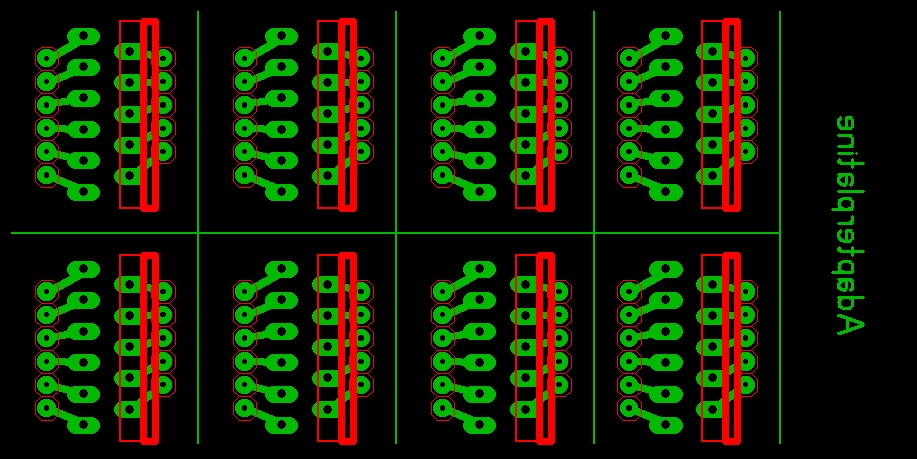 Natürlich habe ich dieses Layout auch als xxx.lay-Datei für SprintLayout 5.0 und höher parat: Download (L6203 Adapterplatine.lay) Nachdem ich das also geätzt, und
gebohrt hatte, konnte ich 8 kleine Platinchen mein
Eigen nennen, die von der einen Seite den L6203
aufnehmen würden und von der anderen Seite her je
eine kleine Stiftleiste im 2,54 mm Rastermaß:
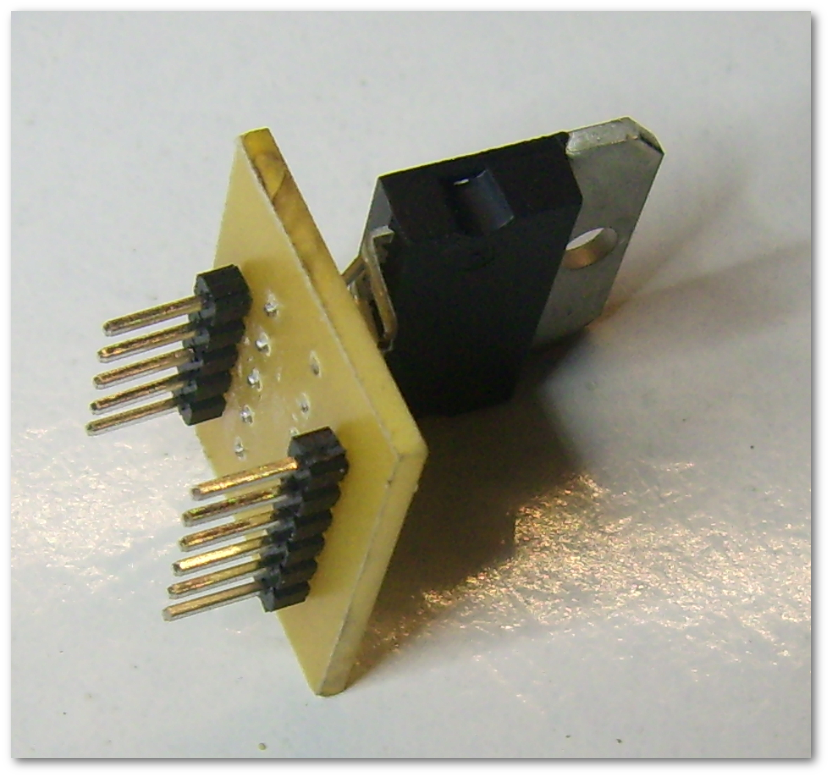
 Die Montage war doch
reichlich fummelig und konnt ohne meine dritte
Hand nicht ausgeführt werden. Aber schließlich
hielt ich das Ergebnis in den Händen:
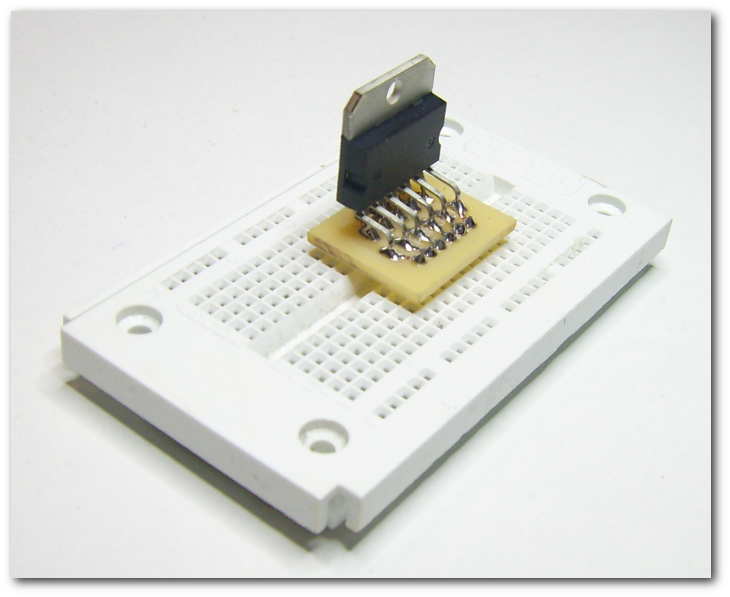
 Jetzt erst bin ich soweit, um mit
dem L6203 erste Experimente durchführen zu können:
 Zunächst sollten wir einmal
schauen, welcher Pin jeweils welche Aufgabe hat.
Dazu werfen wir einen ersten Blick in das Datenblatt: 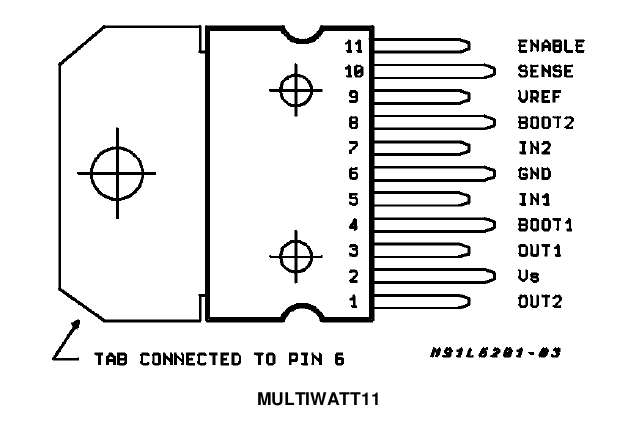 Pinout des L6203 im Multiwatt 11 Gehäuse Damit können wir so aber noch nichts anfangen. Deshalb wäre es sicherlich
sinnvoll, eine bastlerfreundliche Ansicht dieses
Bausteins zu haben. Bewährt haben sich einfache
Rechtecke, die das Gehäuse symbolisieren und die
Masseanschlüsse werden nur als
Massesymbol, ohne die Verbindungen gezeichnet.
Das erhöht den Überblick enorm:
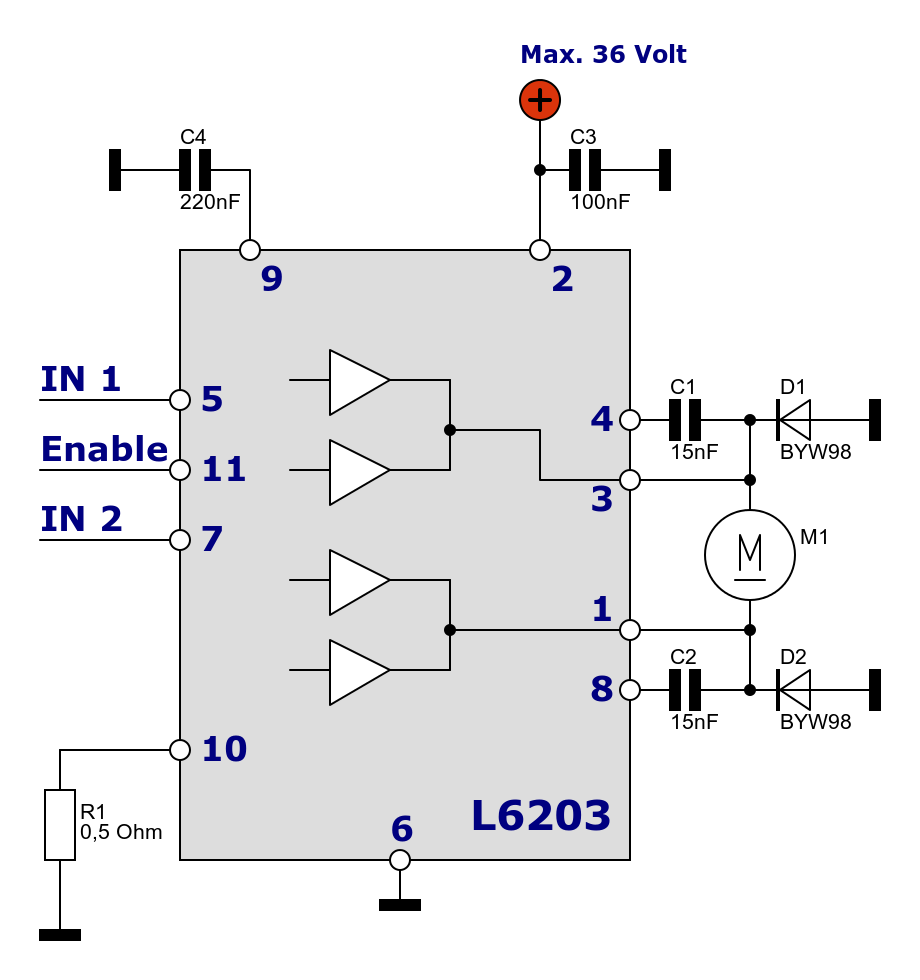 Wie wir sehen, ist die
Beschaltung erfreulich übersichtlich und es
werden nur wenige externe Bauteile benötigt.
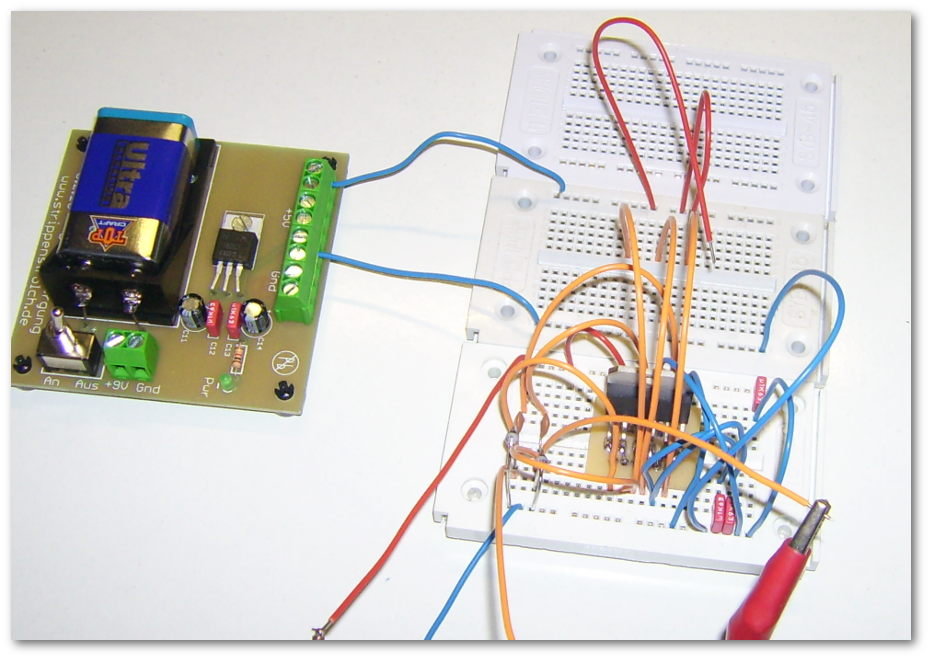
Es gilt also nun, das Ganze auf dem
Steckbrett zu probieren. Schon nach kurzer
Zeit erhalten wir diesen doch recht
sparsamen Aufbau:
 Daraus lässt sich jetzt dieser Schaltplan ableiten. Bitte beachte, dass ich den Sense-Widerstand weggelassen habe, denn den benötigen wir für den ersten Versuch nicht. Außerdem habe ich eine Tabelle eingefügt, die angibt, mit welcher Bitkombination an den Eingängen welche Aktion ausgelöst wird: 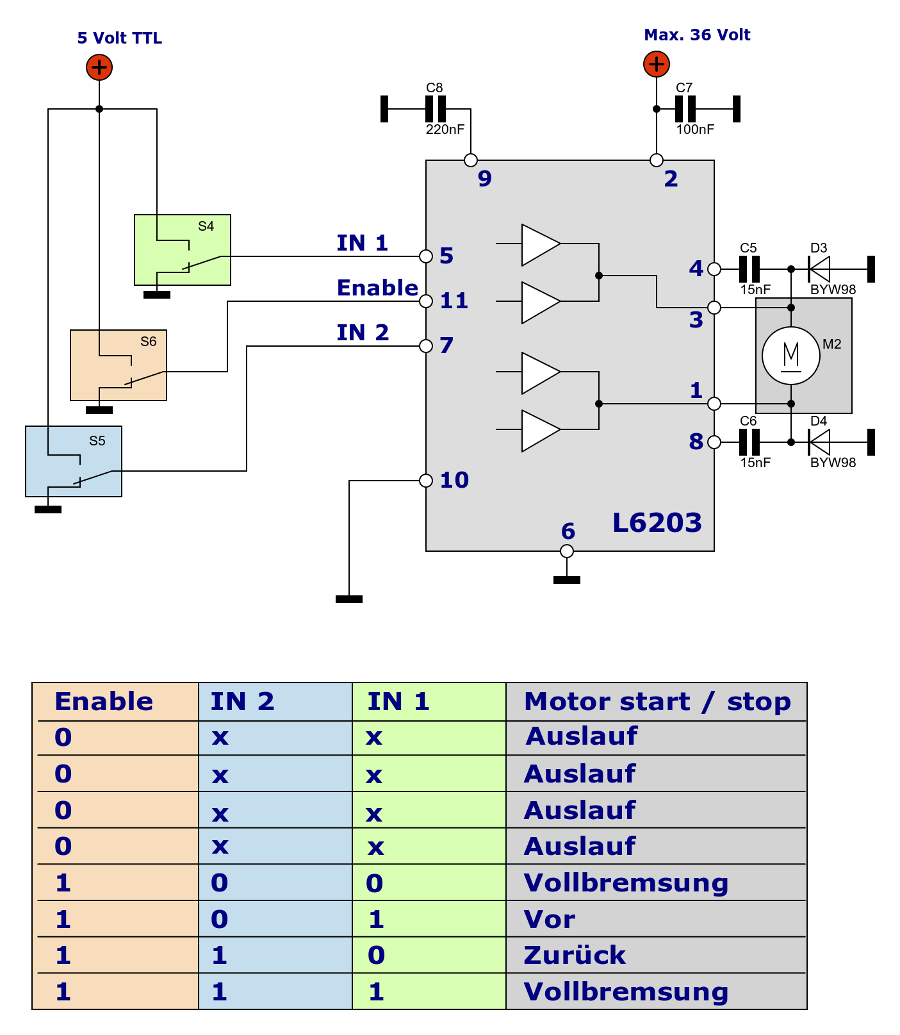 Wir sehen also, dass wir nun in
der Lage sind, mit einem Mikrocontroller oder einer
CMOS- oder TTL-Schaltung einen Motor mit bis zu 36
Volt und maximal 4 Ampere zu steuern.
Das ist aber noch nicht alles. Hieraus lässt sich ein durchaus gebrauchsfertiger Schrittmotortreiber bauen, der dann Schrittmotoren bis 36 Volt und maximal 4 Ampere pro Spule antreiben kann. Dazu benötigen wir 2 Stück des ICs L6203 und ein weiteres IC L297, was die nötigen Signale aus einem Richtungsbit und einem Taktbit herstellt. Ebenso benötigen wir dann auch wieder jeweils einen Sense-Widerstand, damit der Schrittmotor auch die richtige Stromstärke hat, die man dann vorwählen kann. Um es kurz zu machen, so sieht
der Plan aus:
Fortsetzung folgt. Exclusive Anwendungen
wünscht
 |
|
|